Icahn Robotics Society

Velocity Vortex 2016-2017
We built a robot that could collect particles, shoot in the Center Vortex, and press illuminated beacons. The robot was programed with assisted drive capabilities, minor alignment adjustments, and a fully automated shooter. Our autonomous period included firing two particles in the center vortex and then proceeding to knock off the Cap Ball.
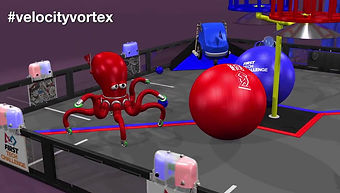
The challenge for the FTC 2016-17 season, named "Velocity Vortex", was a challenge that involved many different robotics and engineering skills. The field consisted of square playing field. At two opposing corners were two ramps of different colors corresponding to each team. Behind these ramps are small pits known as "corner vortexes". Next to these ramps were illuminated "beacons" with two buttons that could be pressed by robots. In the center was a "vortex" that consisted of two circular baskets sitting on a crossbar connected to a rotating pole. Below the vortex were two large "cap balls", that sat on a small platform. There were also 3 small balls, known as "particles" per team that were placed prior to the start of the match. A diagram of the playing field is pictured below

Scoring Points
There were many different ways to score points in Velocity Vortex, some more difficult than others. The different scoring methods are detailed below. Points labelled under the Autonomous section are awarded during Autonomous mode, when the robot is being controlled solely through its own code, and not by a driver. Driver-Controlled points are awarded when the robot is being controlled by a driver. The End Game column refers to the state of an object at the end of the game. For example, if the cap ball is placed in the center vortex, but then removed, no points would be awarded

